

The CAN-FD LIN Gateway is a user-programmable converter/router/data-logger that features two CAN(/FD) channels, a LIN channel, and a RS-232 port. The converter offers a USB port, microSD card slot and multiple digital/analogue inputs and outputs, and its firmware can be developed in C or C++. The device is suitable for a broad range of applications such as protocol conversion, network bridging, data logging, rest-bus simulation, and external peripheral control and monitoring.
Features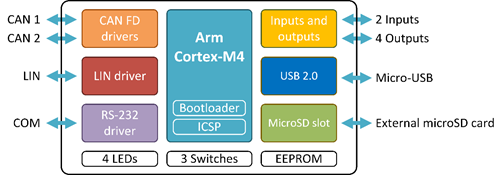
- Two CAN-HS channels with CAN FD support
- LIN channel
- RS-232 port
- MicroSD card slot
- USB port
- 4 digital outputs
- 2 analogue/digital inputs
- 4 status LEDs
- 32-bit Arm Cortex-M4 MCU
- Freely programmable in C/C++ language
- Free-of-charge IDE and C/C++ compiler
- Programming examples available
- Firmware update over USB, CAN, RS-232 or ICSP
- On-board 16 Kbit EEPROM
- Externally or USB-powered
- Table-top use or DIN-rail mount
Firmware can be developed in C/C++ and transferred into the device over USB, CAN, RS-232, or a standard ICSP SWD interface, which also offers code debugging. The device is based on a STM32G4 Arm Cortex-M4 MCU and comes with a free-of-charge IDE, GNU C/C++ compiler, and programming examples.
The on-board EEPROM memory can store user’s application parameters, and the microSD card slot enables the user to load or save large data sets for simulations and data-logging purposes.
The four digital outputs (PWM capable) and the two analogue/digital inputs allow for both input and output triggering. The inputs can read 0-5 V analogue signals, and the outputs offer various output stages (push-pull, HSD, LSD) with currents up to 1.5 A enabling to easily control relays, valves, and other peripherals.
Use Cases
- CAN FD to CAN bridge
- LIN to CAN/CAN FD gateway
- CAN/LIN bus to RS-232
- Data logging
- Communication simulation
- ECU emulation
- Remote monitoring of inputs
- Remote control of outputs
Configurable Gateway
The variant with gateway runtime (P/N: CANFD-LIN-CONF) is also available. The user configures the mapping between CAN and LIN (CAN id to LIN id), CAN and LIN channel parameters, LIN scheduler, and stores the configuration into an internal non-volatile memory. The gateway automatically forwards data from given received CAN Id to LIN bus and vice versa. Further, the analogue inputs and digital outputs can be mapped onto CAN or LIN data.
The ECU Configurator PC application can be used to easily configure the device from PC over CAN bus, and save the configuration into the device. A license for ECU Configurator needs to be purchased separately. This is a single-time payment for a company perpetual license.
Technical Specification
|
Communication and Peripherals |
||
|
Channels |
2 CAN-HS (ISO 11898-2) with CAN FD support (ISO 11898-1:2015; CAN 2.0A/B, ISO CAN FD) |
|
|
Inputs |
2 Analogue/digital inputs (0-5 V) |
|
|
Outputs |
4 Digital outputs (PWM capable) |
|
|
Programming |
Free-of-charge IDE and GNU C/C++ compiler (STM32CubeIDE) |
|
|
Firmware update |
over USB, CAN, RS-232, or ICSP (ST-LINK) |
|
|
Debugging |
ST-LINK SWD (a programming header needed) |
|
|
Non-volatile memory |
Internal 16 Kbit EEPROM |
|
|
LEDs |
3 Dual-color LED |
|
|
|
|
|
|
Electrical |
||
|
Power |
External 7 – 30 V DC with polarity protection over DSUB connector |
|
|
Consumption |
100 mA @ 12 V (approx. 1 W) |
|
|
MCU |
STM32G483 (Arm® 32-bit Cortex®-M4) with DSP and FPU; |
|
|
Transreceivers |
CAN-FD: MCP2562FD |
|
|
|
|
|
|
Mechanical |
||
|
Connectors |
1 D-SUB9M |
|
|
Buttons and switches |
2 DIP switches |
|
|
Dimensions (L x W x H) |
108 x 54 x 30 mm |
|
|
Weight |
85 g |
|
|
Operating temperature |
-20 to 70 °C |
|
|
Protection |
IP20 |
|
|
Placement |
Table (adhesive pads included) |
|
Images









SDK and libraries
STM32CubeIDE project with examples of all device’s peripherals is available on our GitHub account.
Connector Pinout
| CN1 | CN2 | |||
|---|---|---|---|---|
| Pin | Name | Note | Name | Note |
| 1 | DO1 | 5 V HSD | DO3 | 5 V push-pull |
| 2 | CAN1_L | CAN2_L | ||
| 3 | GND | GND | ||
| 4 | LIN1 | RS-232 RxD | In | |
| 5 | GND | GND | ||
| 6 | AI1 / DI1 | 0 – 5 V | DO4 | LSD |
| 7 | CAN1_H | CAN2_H | ||
| 8 | DO2 | 5 V push-pull | RS-232 TxD | Out |
| 9 | Vin / Vbat | AI2 / DI2 | 0 – 5 V | |
Ordering Information
|
Product Number |
Description |
|
CANFD-LIN-GW |
CANFD LIN Gateway |
|
CANFD-LIN-CONF |
Configurable CAN(/FD) – LIN gateway with mappable CAN ID to LIN ID and analogue inputs and outputs; Configuration over the ECU Configurator (see below) from PC over USB |
|
GW-ECU-CONFIG-TOOL |
A PC application for configuration of CANFD-LIN-CONF over USB. |
|
DIN-CLIP |
Clip for mounting on a DIN rail |
How To Order
Contact us if you need a quotation, or buy online through our Store.
Arm is a registered trademark of Arm Limited (or its subsidiaries) in the US and/or elsewhere.